
























Список продуктов

Описание
В комплекте: мы предоставляем онлайн-уроки и видео на китайском и английском языках. Мы будем обновлять этот урок на основе отзывов клиентов.Существует множество методов подключения, вы также можете паять в соответствии со своими предпочтениями.
2. Проверьте правильность работы всех цепей
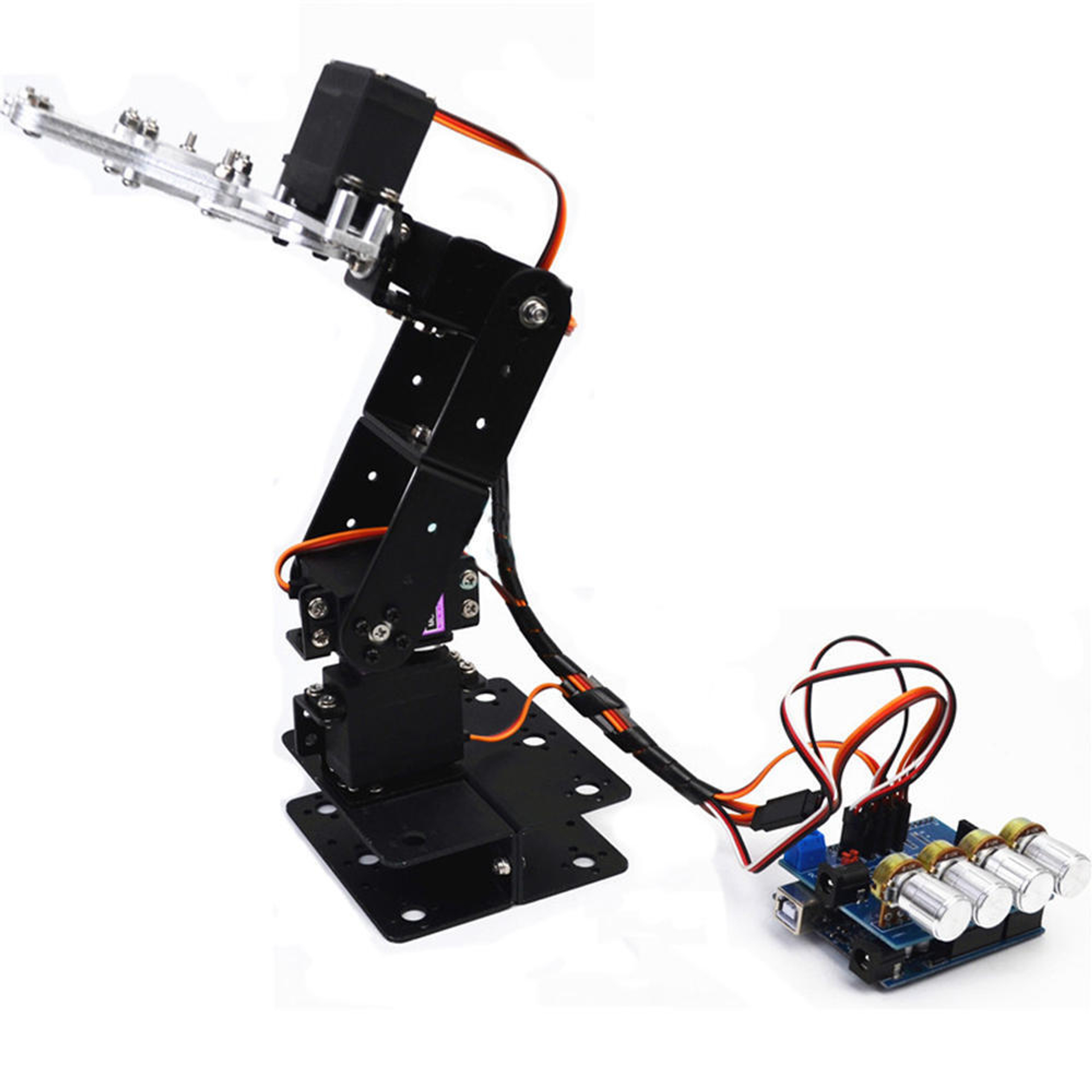
1. Установите плату расширения потенциометра на arduino
2. Подключите четыре сервопривода к плате расширения потенциометра
3. Подключите адаптер к плате расширения потенциометра
4. По очереди поверните четыре ручки, чтобы проверить, вращаются ли сервоприводы одновременно
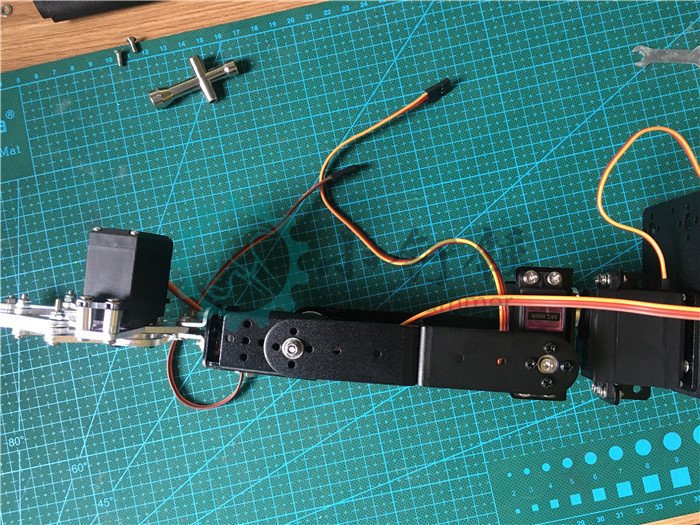
3. Установите Сервопривод на металлические детали.
Меры предосторожности
Общий угол поворота рулевого механизма составляет 180 градусов, то есть 90 градусов влево и вправо. Вы можете найти центральное положение рулевого механизма, повернув ручку. Затем, имитируя движение, найдите среднее положение соответствующей детали и установите рулевой механизм в это положение.
В противном случае он может заклинить. В основном из-за того, что угол поворота рулевого механизма блокируется металлическими деталями.
Механический рычаг из алюминиевого сплава 4-dof

Обязательно к прочтению
Существует несколько способов установки манипулятора. Модуль очень универсален и прост в установке в соответствии с вашими потребностями.
Мы приводим пример установки в качестве ориентира, вы можете вносить изменения в зависимости от ситуации.
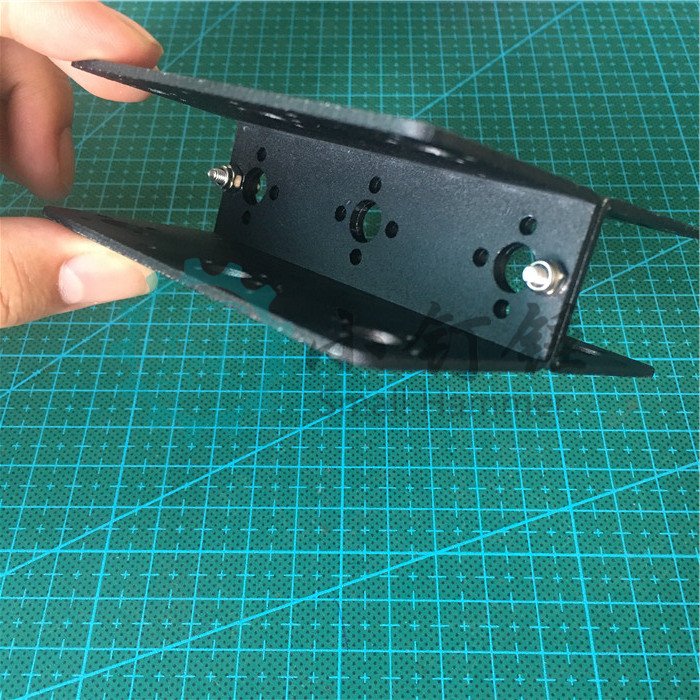
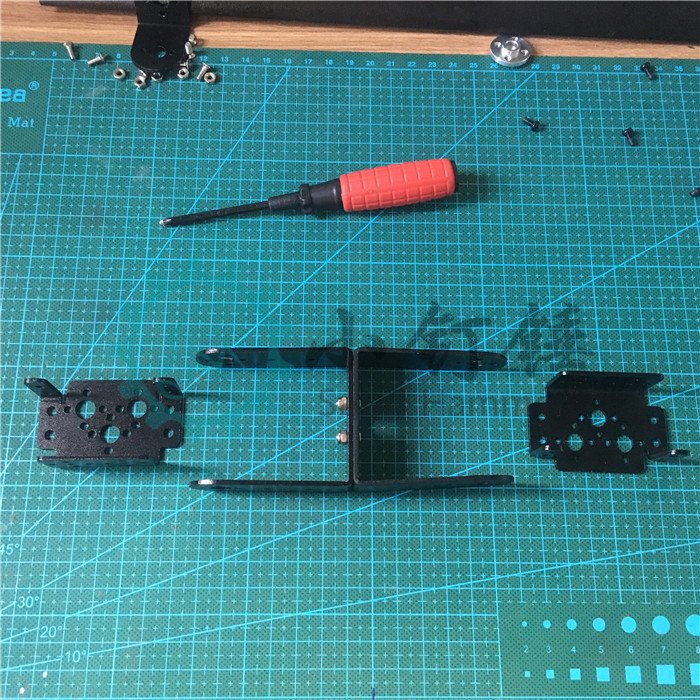
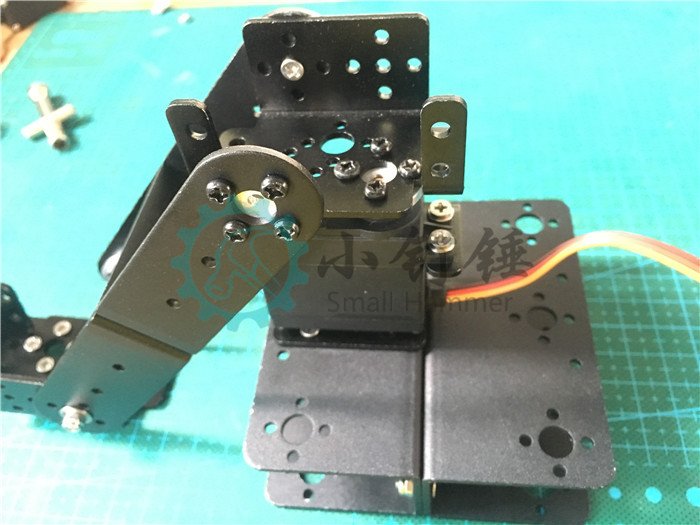
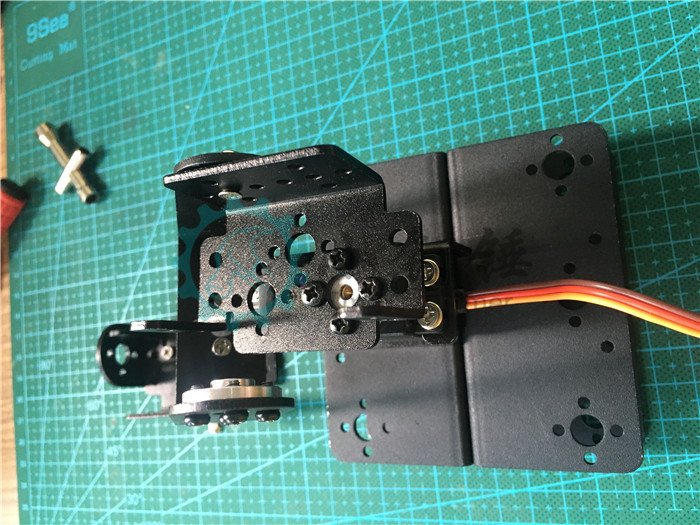
шаг 1 : установите основание
Используйте винт M3X10 и противооткатную гайку M3

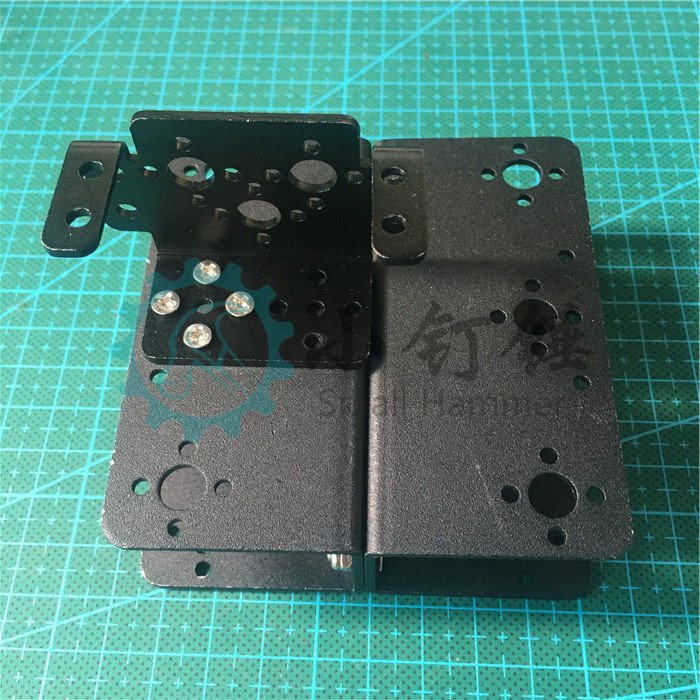

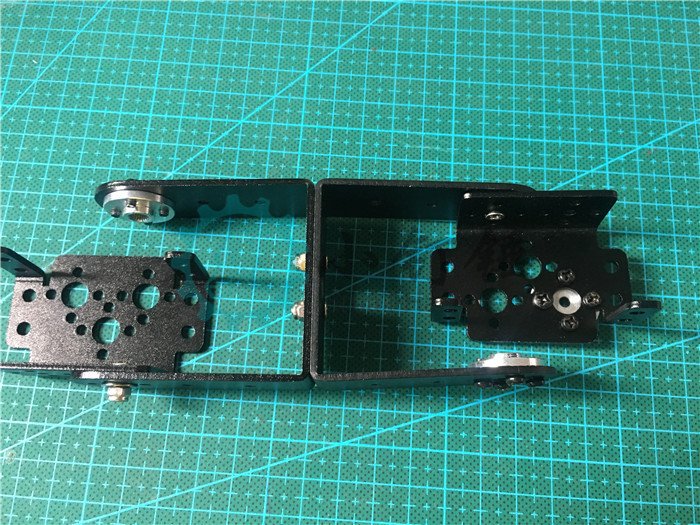
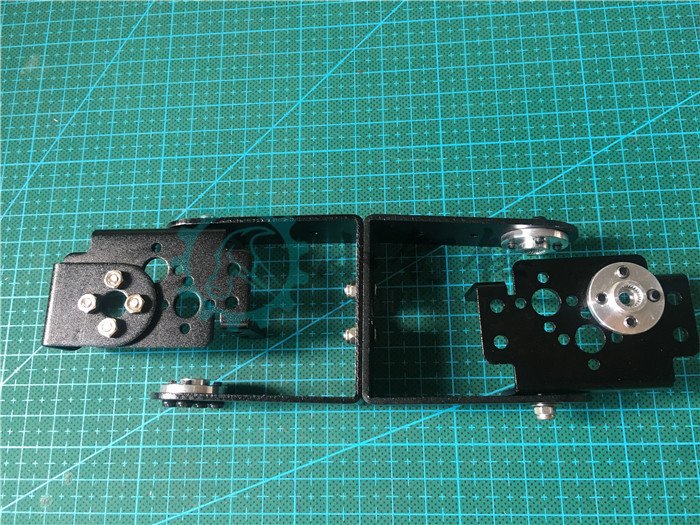
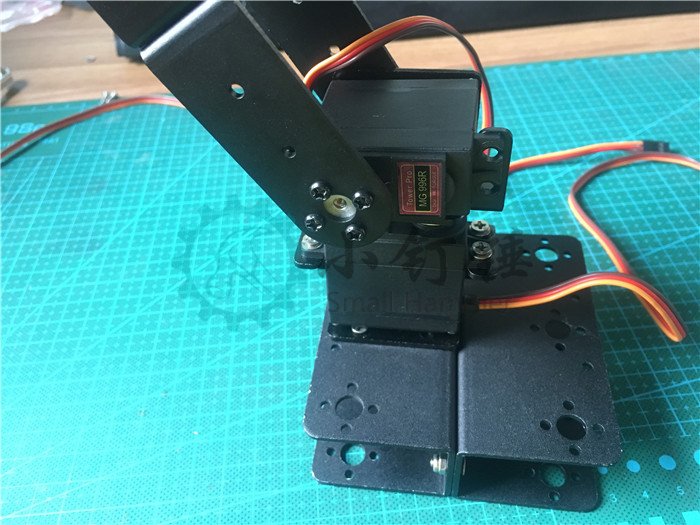
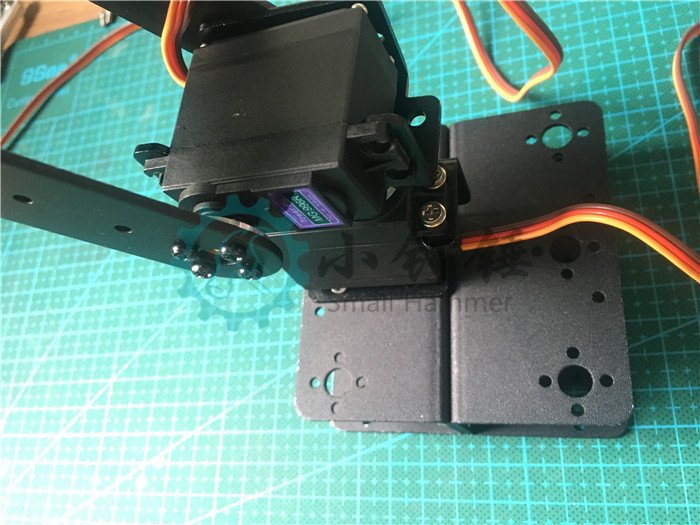
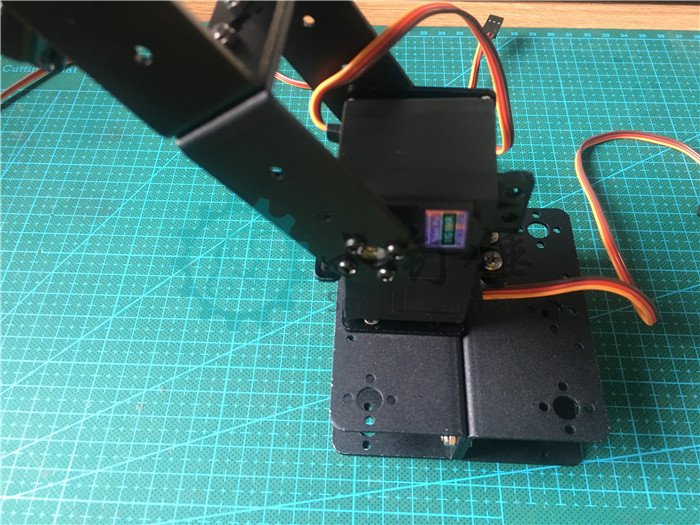
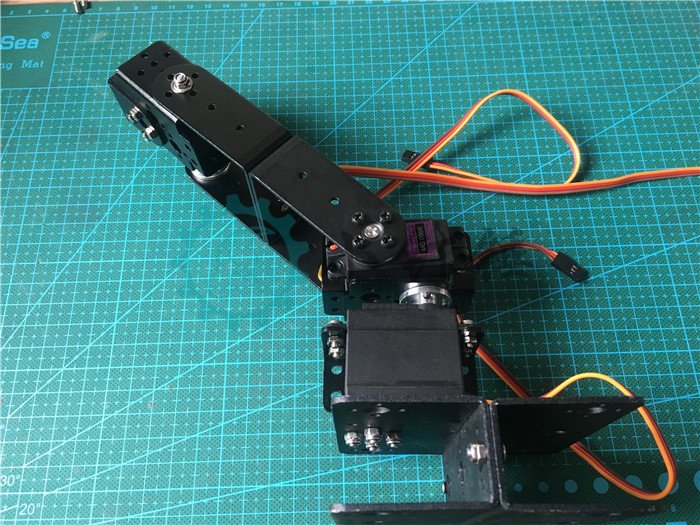
Шаг 2: Установите сервопривод рычага 2
Два длинных U-образных кронштейна, соединённых винтами M3*10 и контргайками
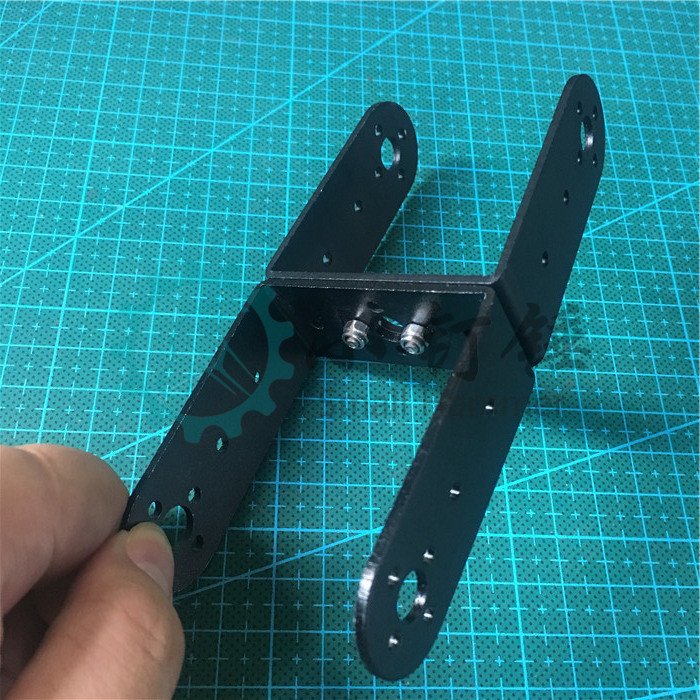
Многофункциональный кронштейн, установите с противоположной стороны

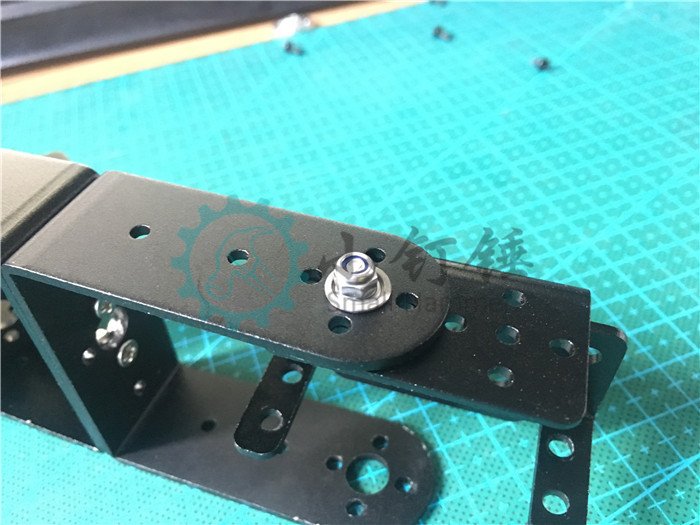
Винты M3*12, подшипники, контргайки для крепления многофункциональных кронштейнов

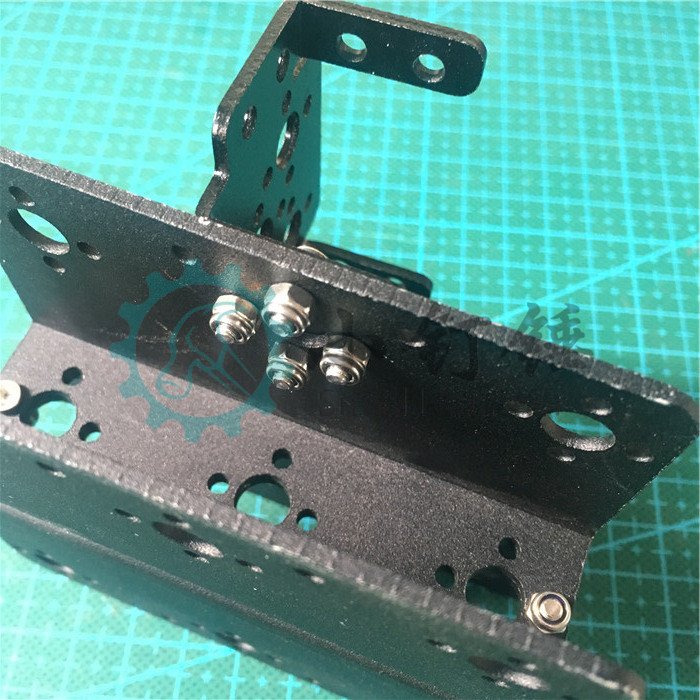
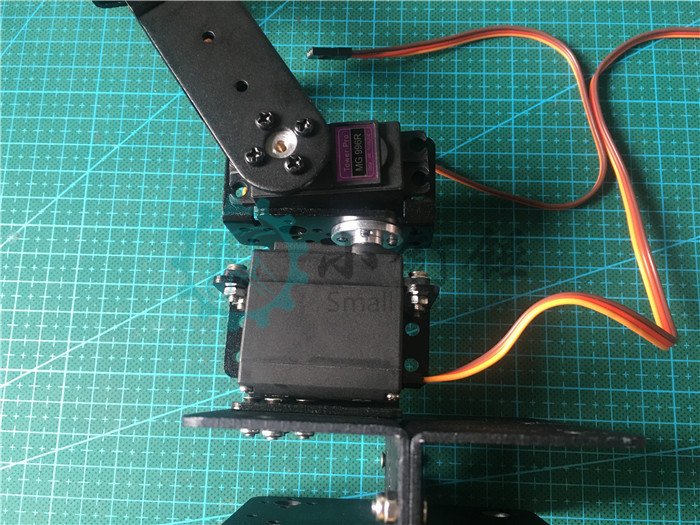
Установите L-образный кронштейн на левый кронштейн с помощью винтов M3*10 и гаек из нержавеющей стали M3
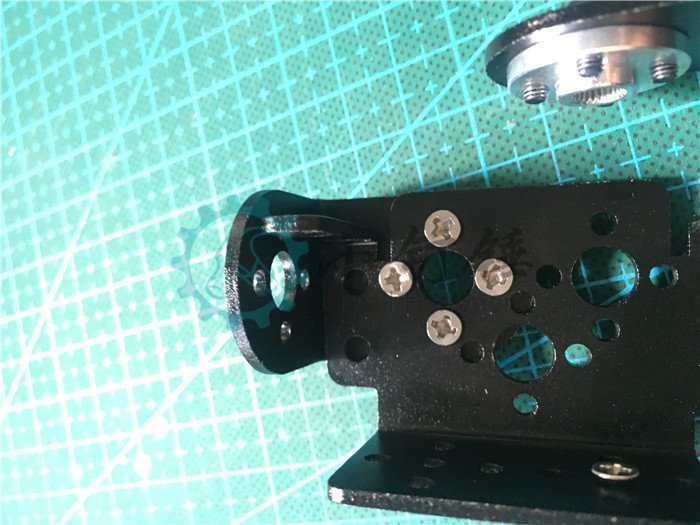
Обратите внимание на угол установки рулевого механизма 2 — 45 градусов под углом вверх

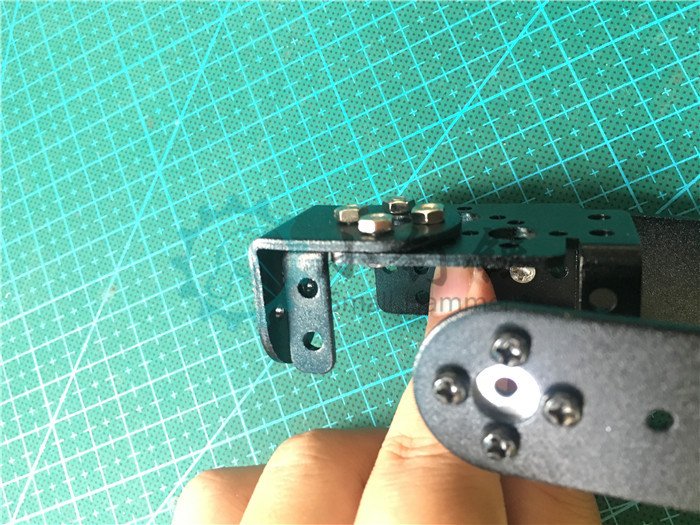
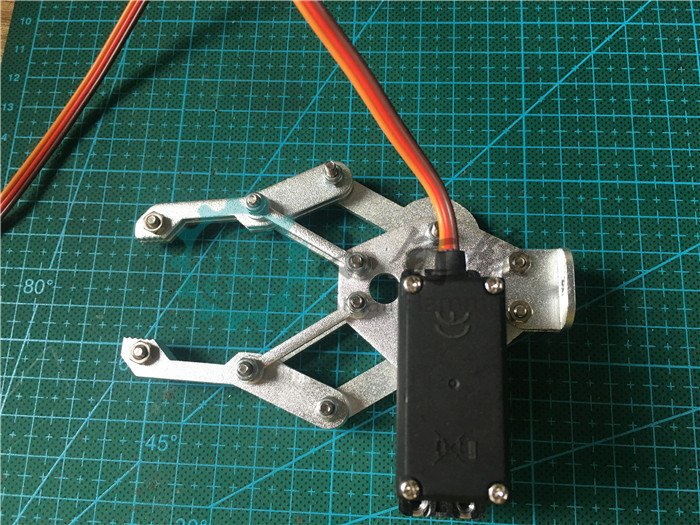
Шаг 3: Установите механическую клешню
Механическая клешня для крепления сервопривода

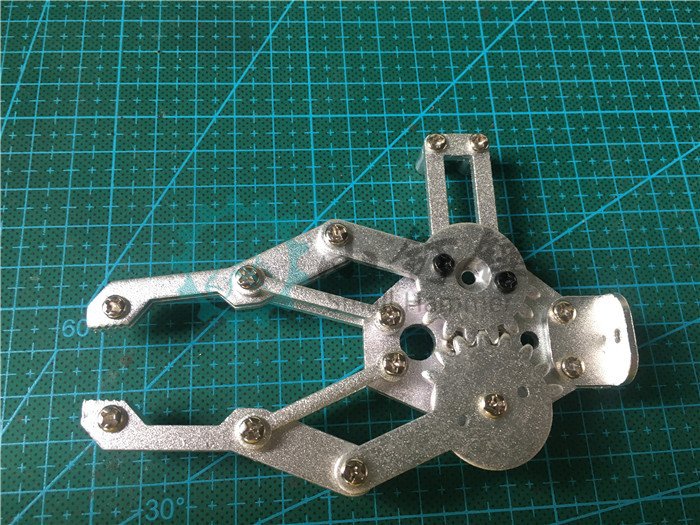

Установите рулевое устройство так, чтобы лапы открылись наполовину, и установите Сервопривод
Шаг 4 : соедините рычаг с когтем
Закрепите лапу на рычаге с помощью винтов M3*10 и гаек из нержавеющей стали
При установке рулевого механизма механические рычаги и тяги должны располагаться параллельно.

Винты установлены, и рычаг установлен.
Загрузка исходного кода
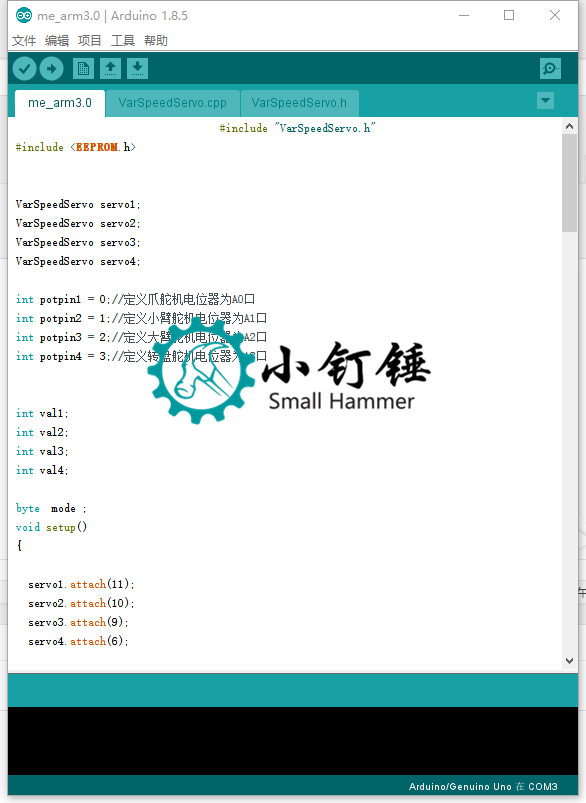
Загрузка программы
Откройте программу и автоматически откройте два зависимых пакета, как показано ниже.
Для получения подробных инструкций по загрузке программ и решения проблем, с которыми вы можете столкнуться, пожалуйста, посетите раздел «Руководство по основам работы с Arduino» .
Теперь вы можете управлять роботом
