


























Обзор комплекта
Как создать свою собственную роботизированную руку для выполнения различных движений? Это возможно! С использованием комплекта для роботизированной руки, вы сможете построить управляемый механический манипулятор с использованием микроконтроллера ARDUINO. Комплект включает в себя REV4 и 2 модуля джойстика для управления углом наклона 4 сервоприводов.
Собрав 4-сервоприводную механическую руку самостоятельно, вы получите все необходимое для установки и отладки. В комплекте предусмотрены три метода управления:
- Управление проводным джойстиком (поставляется в комплекте);
- Управление по Bluetooth с телефона (обратите внимание: модуль Bluetooth HC-06 не включен в комплект, предоставляется только тестовый код для Bluetooth и приложение для Android);
- Беспроводное управление джойстиком PS2 (модуль джойстика PS2 также не включен в комплект, предоставляется только тестовый код).
Вся необходимая информация для вашего проекта роботизированной руки содержится в комплекте. Погрузитесь в увлекательное путешествие по миру программирования. Начните прямо сейчас!
Особенности этого комплекта
- Подробные инструкции по установке для легкости в сборке.
- Подробные методы отладки, начиная с использования Arduino для быстрого входа в проект.
- Три удобных способа управления:
- Проводное управление с использованием джойстика.
- Управление по Bluetooth с мобильного телефона (обратите внимание: модуль Bluetooth HC-06 не включен в комплект; предоставляется только тестовый код для Bluetooth и приложение для Android).
- Беспроводное управление джойстиком PS2 (модуль джойстика PS2 не входит в комплект; предоставляется только тестовый код).
Параметры платы расширения двигателя/сервопривода TB6612FNG:
- Напряжение VIN: DC 7-15 В.
- Ток VIN: 5A.
- Двусторонний выход 5 В: 5 В/3A.
- TB6612FNG: VIN-вход постоянного тока 7-15 В; средний ток привода 1,2 А; пиковый ток 3,2 А.
- Интерфейс PS2: совместим с ресивером Sony PS2, подключается непосредственно к плате расширения.
- Размеры: 73*53,34 мм.
Эти особенности делают комплект идеальным выбором для тех, кто желает создать свою роботизированную руку и исследовать мир программирования.
Список деталей
Основная плата Arduino Uno - 1 шт.
- Щит двигателя/сервопривода TB6612FNG - 1 шт.
- Черные акриловые панели MeArm = 3 мм - 1 шт.
- Черная акриловая ручка MeArm = 3 мм - 1 шт.
- Черный ABS Цилиндрический держатель диаметром 42 мм - 1 шт.
- Черный сервопривод на 180° - 4 шт.
- Модуль Bluetooth HC-06 - 1 шт.
- Модуль джойстика - 2 шт.
- 3D крышка джойстика PS2 - 2 шт.
- Желто-черная ручка Крестообразной отвертки 3*40 мм - 1 шт.
- Оцинкованный маленький гаечный ключ M2 + M3 толщиной 2 мм с двумя головками - 1 шт.
- Поперечный винт с круглой головкой М3 * 6 мм - 12 шт.
- Поперечный винт с круглой головкой М3* 10 мм - 22 шт.
- Винт с плоской головкой М3 * 14 мм - 2 шт.
- Поперечный винт с круглой головкой М3* 12 мм - 12 шт.
- Медная стойка М3 * 24 + 6 мм - 4 шт.
- Медная стойка М3 * 6 мм + 6 мм - 10 шт.
- Шестигранная гайка из нержавеющей стали M3 - 22 шт.
- Шестигранная контргайка M3 - 24 шт.
- Винт с крестообразной нарезкой M1.2x5 мм - 8 шт.
- Винт с крестообразной нарезкой M2x5 мм - 10 шт.
- Плоская шайба из нержавеющей стали M3 - 10 шт.
- Крестовой резьбонарезной винт M2x8 мм - 2 шт.
- Винт с плоской головкой М3 * 16 мм - 2 шт.
- Соединительный провод 10 см от папа-мама - 4 шт.
- Соединительный провод 50 см от мама-мама - 10 шт.
- Черные кабельные стяжки 3*100 мм - 1 шт.
- Корпус для двухэлементного аккумулятора 18650 со штекерным выводом 15 см - 1 шт.
Не забудьте снять защитную пленку с акриловой платы перед началом сборки комплекта.
Руководство по сборке
Шаг 1: Начните с сборки опорной платы
1.1. Подготовьте компоненты:
- M3 * 30 x 5 мм однопроходные медные стойки * 4
- M3 * 6 мм x 6 мм однопроходные медные стойки * 4
- Шестигранные гайки M3 * 8
- Черная акриловая пластина * 1
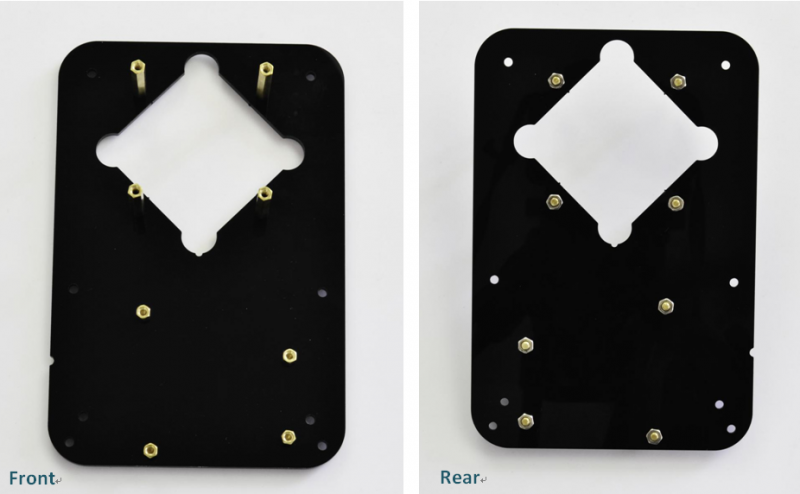
1.2. Разместите черную акриловую пластину на ровной поверхности, чтобы начать сборку опорной платы.
1.3. Вставьте M3 * 30 + 5 мм медные стойки в угловые отверстия черной акриловой платы. Эти стойки служат опорами для основания вашей роботической руки.
1.4. Вставьте M3 * 6 мм + 6 мм медные стойки в оставшиеся отверстия на черной акриловой плате. Эти стойки будут поддерживать другие компоненты вашей руки.
1.5. Закрепите все стойки с помощью шестигранных гаек M3 * 8, обеспечивая надежное соединение.
Поздравляю, вы завершили сборку опорной платы. Переходите ко второму шагу для продолжения создания своей собственной роботической руки!

1.6. Прикрутите медные стойки к черной акриловой опорной плите с использованием шестигранных гаек M3. Обеспечьте надежное соединение, закрепив все четыре стойки.
2.1. Разместите плату управления (например, Arduino UNO) на черной акриловой опорной плите.
2.2. Используя винты M3 * 6 мм с круглой головкой, закрепите плату Arduino UNO на опорной плите.
2.3. Поместите TB6612FNG моторный щит на опорную плату рядом с платой управления.
(png )
)
Прежде всего, используйте три винта с круглой головкой M3 * 6 мм для крепления платы Arduino Uno к стойке.
(png )
)
Затем установите экран привода двигателя на плату Arduino Uno.
(png )
)
(3) После завершения описанной выше сборки, установите поворотную сервопластину на основание.
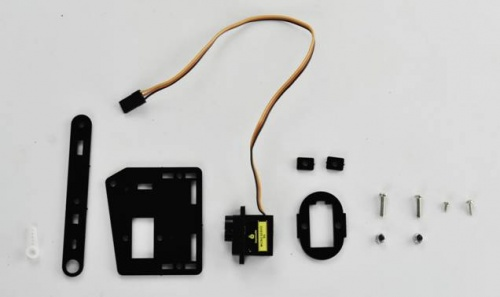
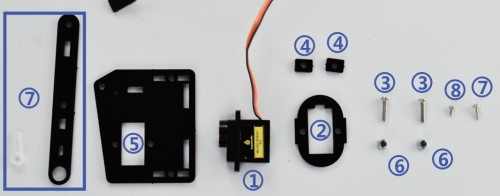
Вам понадобятся следующие компоненты:
- Винт с круглой головкой M3 * 12 мм * 2
- Шестигранная контргайка M3 * 2
- Черный сервопривод на 180 ° * 1
- Акриловая пластина * 4
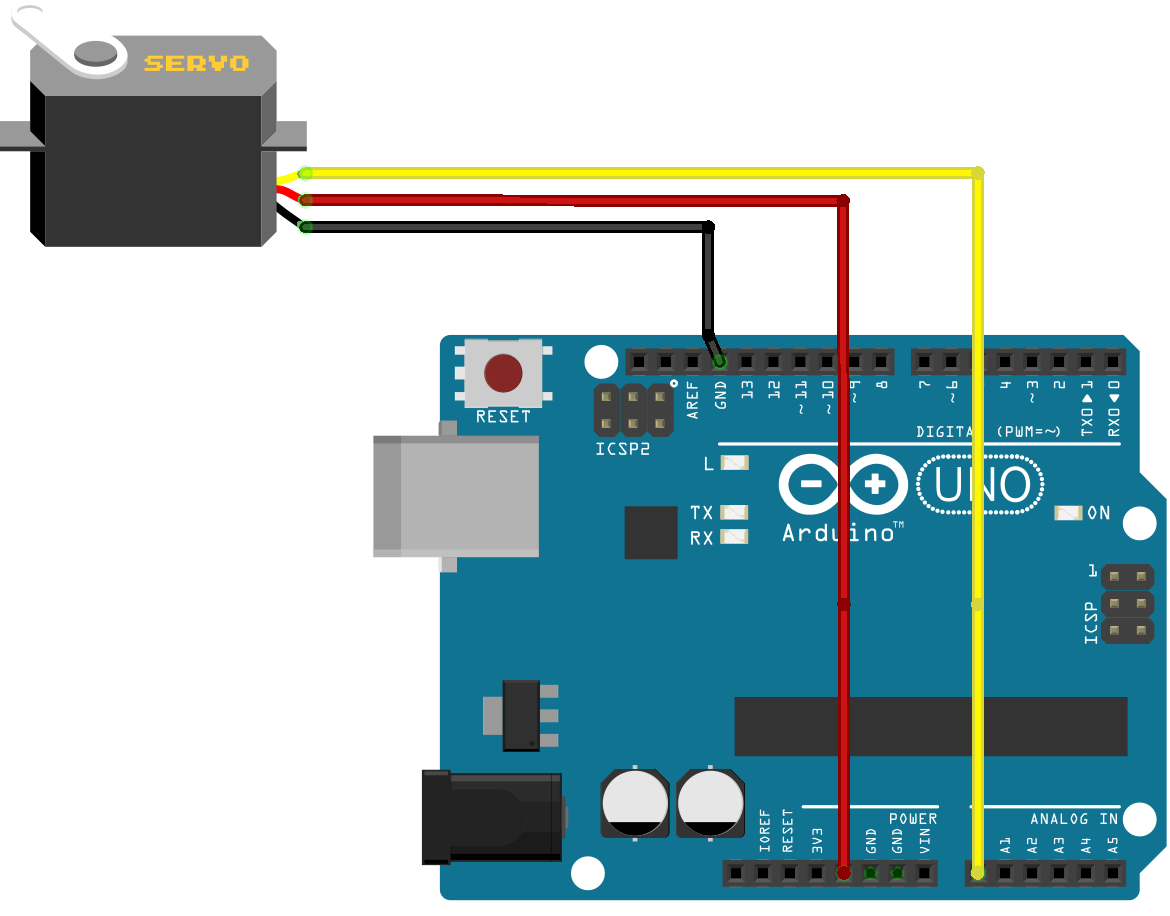
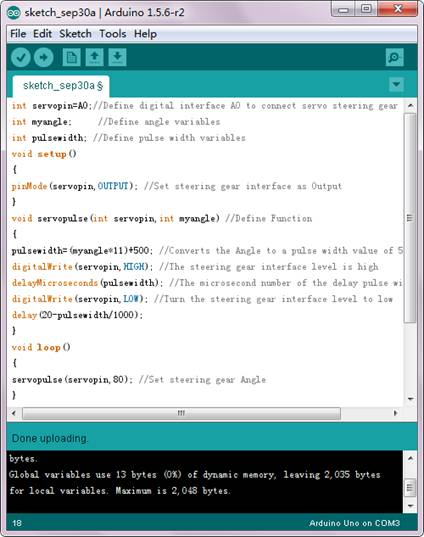
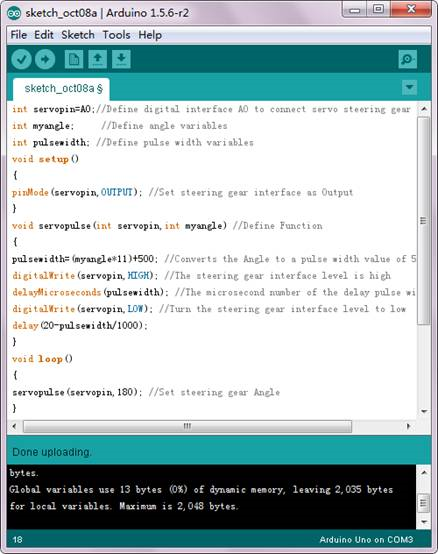
Примечание: перед установкой сервопривода следует установить угол наклона сервопривода на 80 градусов. Чтобы установить угол наклона сервопривода, выполните следующие шаги:
- Подключите сервопривод к A0 моторному щиту.
- Загрузите следующий код на плату Arduino UNO.
- Включите питание и нажмите кнопку сброса.
- Сервопривод повернется на 80°.
int servopin = A0; // Определение цифрового интерфейса A0 для подключения сигнальной линии сервопривода
int myangle; // Определение переменной для угла
int pulsewidth; // Определение переменной для ширины импульса
void setup()
{
pinMode(servopin, OUTPUT); // Установка интерфейса управления сервоприводом как выход
}
void servopulse(int servopin, int myangle) // Определение функции
{
pulsewidth = (myangle * 11) + 500; // Преобразование угла в значение ширины импульса от 500 до 2480
digitalWrite(servopin, HIGH); // Уровень интерфейса сервопривода устанавливается в HIGH
delayMicroseconds(pulsewidth); // Задержка в микросекундах с учетом значения ширины импульса
digitalWrite(servopin, LOW); // Уровень интерфейса сервопривода устанавливается в LOW
delay(20 - pulsewidth / 1000);
}
void loop()
{
servopulse(servopin, 80); // Установка угла сервопривода
}
// Код для угла 0 гра int servopin = A0; // Определение цифрового интерфейса A0 для подключения сигнальной линии сервопривода
int myangle; // Определение переменной для угла
int pulsewidth; // Определение переменной для ширины импульса
void setup()
{
pinMode(serv дусов:
// servopulse(servopin, 0);
// Код для угла 80 градусов:
// servopulse(servopin, 80);
// Код для угла 180 градусов:
// servopulse(servopin, 180);
(4) Теперь, когда угол наклона сервопривода правильно установлен и базовая пластина сервопривода собрана, выключите сервопривод, чтобы избежать ошибок с углом наклона. Убедитесь, что сервопривод может свободно вращаться, не затягивайте винты слишком сильно.
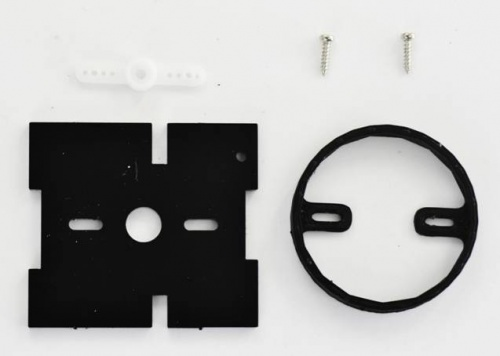
(5) Завершив настройку сервопривода, приступайте к установке опорной пластины сервопривода, следуя указаниям ниже
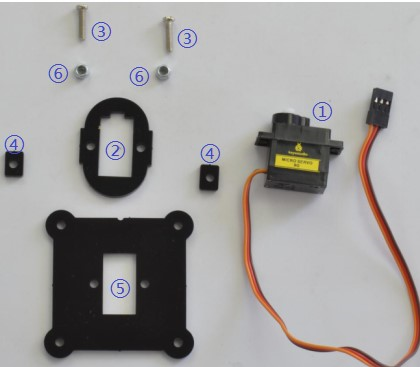
(6) Установите акриловую пластину (2) на серводвигатель.
(7) Затем прикрепите две акриловые пластины (4) к сервоприводу с помощью двух винтов М3 * 12 мм с круглой головкой.

(8) Затем прикрепите акриловую пластину (5) к сервоприводу с помощью двух шестигранных контргайок M3 (6).
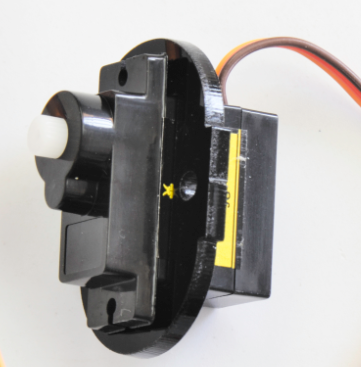
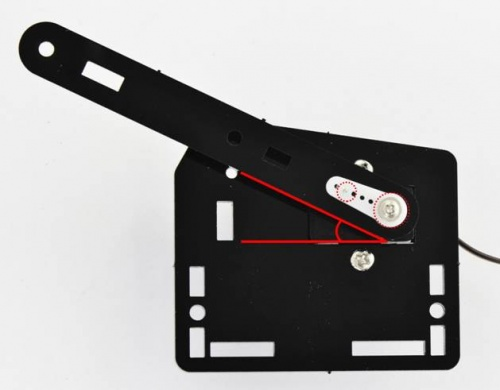
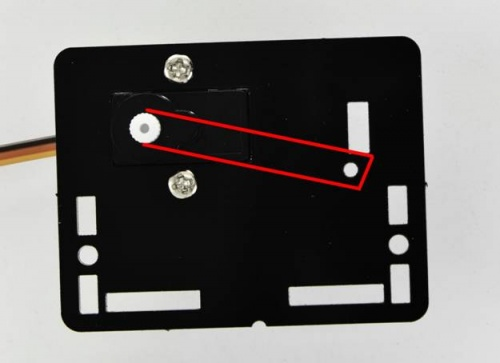
(9) После выполнения указанных выше шагов, у вас должна быть сборка с деталями, как показано на изображении ниже (обратите внимание на красные метки).
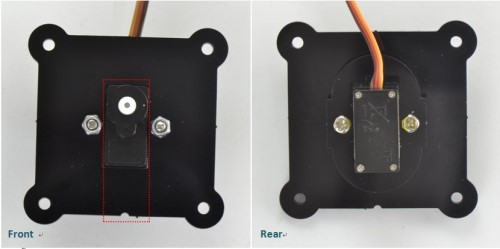
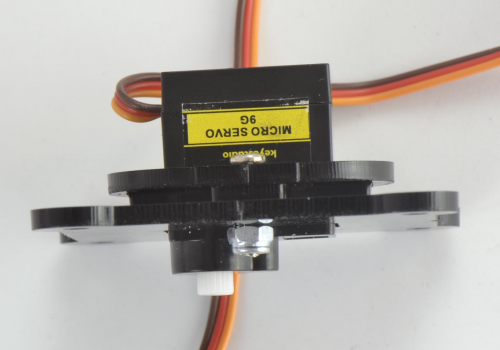
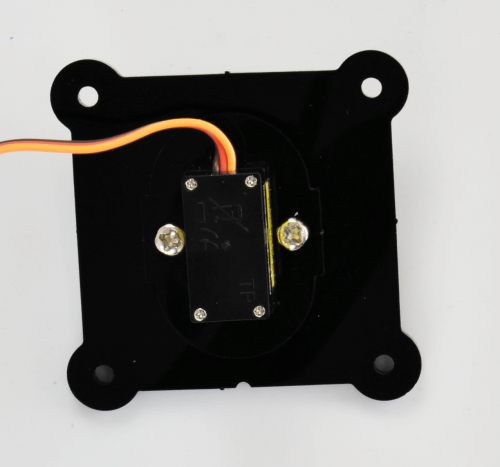
(10) В конце концов, после завершения всех предыдущих шагов, вы должны получить полную базовую часть сервопривода, как показано на изображении ниже. Теперь вы можете переходить к следующим шагам сборки роботизированной руки.
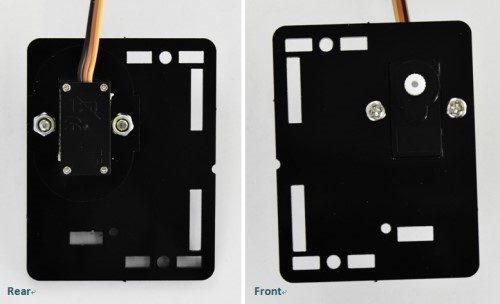
После завершения всех предыдущих шагов, переходите к установке базовой части сервопривода на опорную пластину. Для этого используйте четыре винта M3 с круглой головкой длиной 6 мм. Прикрепите базовую часть к опорной пластине, как показано на изображении.
(png  )
)
После завершения предыдущего шага, прикрепите сервопластину к опорной плите, используя четыре винта с круглой головкой M3 длиной 6 мм. Убедитесь, что все винты затянуты достаточно крепко, чтобы обеспечить надежную фиксацию.
(png )
)
Шаг 2: Соберите средние части руки
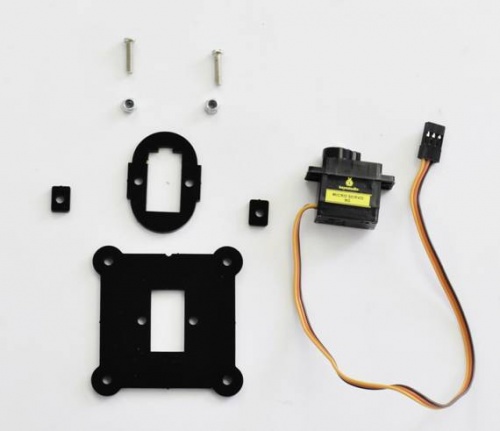
Далее мы приступаем к сборке средней части руки. Для этого вам потребуются следующие компоненты:
- Винт с круглой головкой M3 * 12 мм * 2
- Шестигранная контргайка M3 * 2
- Винт с крестообразной нарезкой m2x5 мм * 1
- Винт с крестообразной нарезкой m2x8 мм * 1
- Черный сервопривод на 180° * 1
- Белое крепление сервопривода * 1
- Акриловая пластина * 5
Очень важно установить угол наклона сервопривода на 180 градусов перед установкой сервопластины. Для этого используйте тот же метод, что и при настройке сервопривода на 80°, просто измените servopulse(servopin, 80) на servopulse(servopin, 180) в предоставленном коде. Это обеспечит правильное положение сервопривода для дальнейшей сборки.
Теперь выполните сборку сервопластины левой руки, следуя указаниям ниже. Обратите внимание на правильное направление сервопривода, положение коромысла, присоединенного к сервоприводу, и отмеченное положение для достижения правильной конфигурации.
Начните, устанавливая акриловую пластину (2) на левый сервопривод.

Затем закрепите две акриловые пластины (4) на левом сервоприводе, используя два винта с круглой головкой M3 * 12 мм ③. В результате вы получите левую сервопластину, изображенную ниже.

После этого прикрутите левую сервопластину к акриловой пластине (5), используя две шестигранные контргайки M3(6). Таким образом, вы получите опорную пластину левого сервопривода, изображенную ниже.
Затем прикрепите акриловую пластину и белое крепление сервопривода (7) к левой опорной плите сервопривода, используя винт с крестообразной нарезкой M2x8 мм и винт с крестообразной нарезкой M2x5 мм(8).
В конце концов, у вас должна получиться полная сервопластина левой руки, как показано на изображении.

Следующим шагом будет крепление крепления сервопривода к нижней пластине рычага. Вам потребуется два винта с крестообразной нарезкой M2x8 мм, белое крепление сервопривода, акриловая нижняя пластина и черный цилиндрический держатель.
Прикрепите белое крепление сервопривода и черный цилиндрический держатель к акриловой пластине с использованием двух винтов с крестообразной нарезкой размером M2x8 мм.

Для сборки правой сервопластины рычага подготовьте следующие детали:
- 2 винта с круглой головкой M3 * 12 мм
- 2 шестигранные контргайки M3
- 1 винт с крестообразной нарезкой M2 * 5 мм
- 1 винт с крестообразной нарезкой M2 * 8 мм
- 1 черный сервопривод на 180°
- 1 белое крепление сервопривода
- 5 черных акриловых пластин

Замечание: Для правильной установки сервопривода рекомендуется предварительно установить угол наклона на 0 градусов. Процесс аналогичен настройке сервопривода на 80 градусов, описанной выше. Для этого достаточно изменить строку кода с servopulse (servopin,80) на servopulse (servopin, 0).
Далее, выполните сборку правой сервоплаты, соблюдая указанные ниже шаги. Обратите внимание на ориентацию сервопривода, маятника, подключенного к сервоприводу, и отмеченного положения.

На первом этапе установите акриловую пластину (2) на правый серводвигатель.
После этого, закрепите две акриловые пластины (4) на сервоприводе, используя два винта с круглой головкой M3 * 12 мм③.
Затем закрепите правую сервопластину к акриловой пластине (5) с использованием двух шестигранных контргаек M3(6).
Следующим шагом закрепите короткий шарнир акриловой пластины и белое крепление сервопривода (7) на правом серводвигателе при помощи самореза M2x8 мм и самореза M2x5 мм(8).
В конечном итоге у вас должна получиться полная левая сервопластина. Пример представлен ниже.
